| 产品特性:RGTI | 品牌:GSA | 型号:RGTI |
| 适用机床:车床 | 最大载荷:1000kN | 丝杆外径:20mm |
| 丝杆底径:10mm | 丝杆螺距:2.5mm | 是否库存:是 |
| 是否批发:是 | 规格:RGTI |
反转式行星滚柱丝杠、电动执行器。Tesla Bot 特斯拉机器人同款反转行星丝杠
反转式行星滚柱丝杠介绍:
滚柱通过齿圈与螺纹轴同步,沿螺母平移。作用在平移推管上的作用负载通过通过行星滚柱传递到旋转轴或螺母。齿圈和导轨使滚柱进行滚动,并确保其在周围上位置均匀。以实现近乎wan美的负载分配。齿圈和导向板可避免滚轮之间产生寄生摩擦。

反转式行星滚柱丝杠在特斯拉机器人应用在机器人关节上:
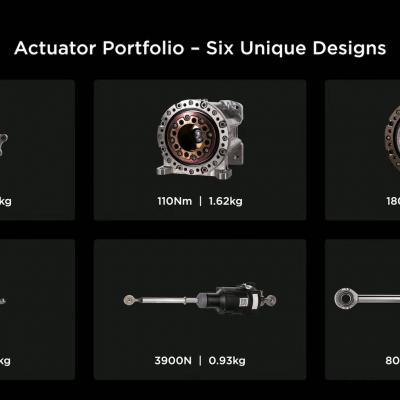
通过仿真工具进行仿真实验,综合考虑成本和重量,得到六种关节,包括三种旋转执行器,三种线性执行器。 整体采用电池组供电,搭配电驱伺服关节的形式,其中旋转关节采用无框电机+双编码器+力矩传感器+谐波的方案,和很多协作机器人关节一样,有力矩传感器加双编码器,获得关节的力矩和输入输出位置信息,目前还不知道他的精度,精度和成本关系很大。 线性关节采用的无框电机+行星滚柱丝杠+力传感器,旋转关节整体的输出扭矩密度和当前各大人形机器人厂家的关节性能类似,线性关节能够提足够大得力输出,但***牺牲了输出速度性能,可能会限制了下肢的高动态运动能力。 基本上和当前协作机械臂的关节方案高度类似,无框力矩电机+谐波减速器+高低速双编码器+抱闸+力矩传感器+输出端交叉滚子轴承。这套方案我觉得如果是用在固定基的协作机械臂上没有问题,而用在浮动基的双足上,是不是会显得太过笨重了,尤其是每个关节都集成抱闸。
下肢采用无框电机+反转行星丝杠的线性执行器方案: ————一般丝杠的传动精度高,输出力能力强,但反驱透明度差,响应速度偏慢,这套驱动方案会***限制下肢高动态的运动能力,同时成本也不低。 下肢这个关节方案较上肢关节相比缺少了抱闸,使用了本身就具备自锁能力的行星丝杠将旋转运动转化为线性。 ———————————————— 具体详情见下图 获取更多关于反转行星滚柱丝杠的信息,可以联系: 王工18611115562(微信同步)。